Abstract
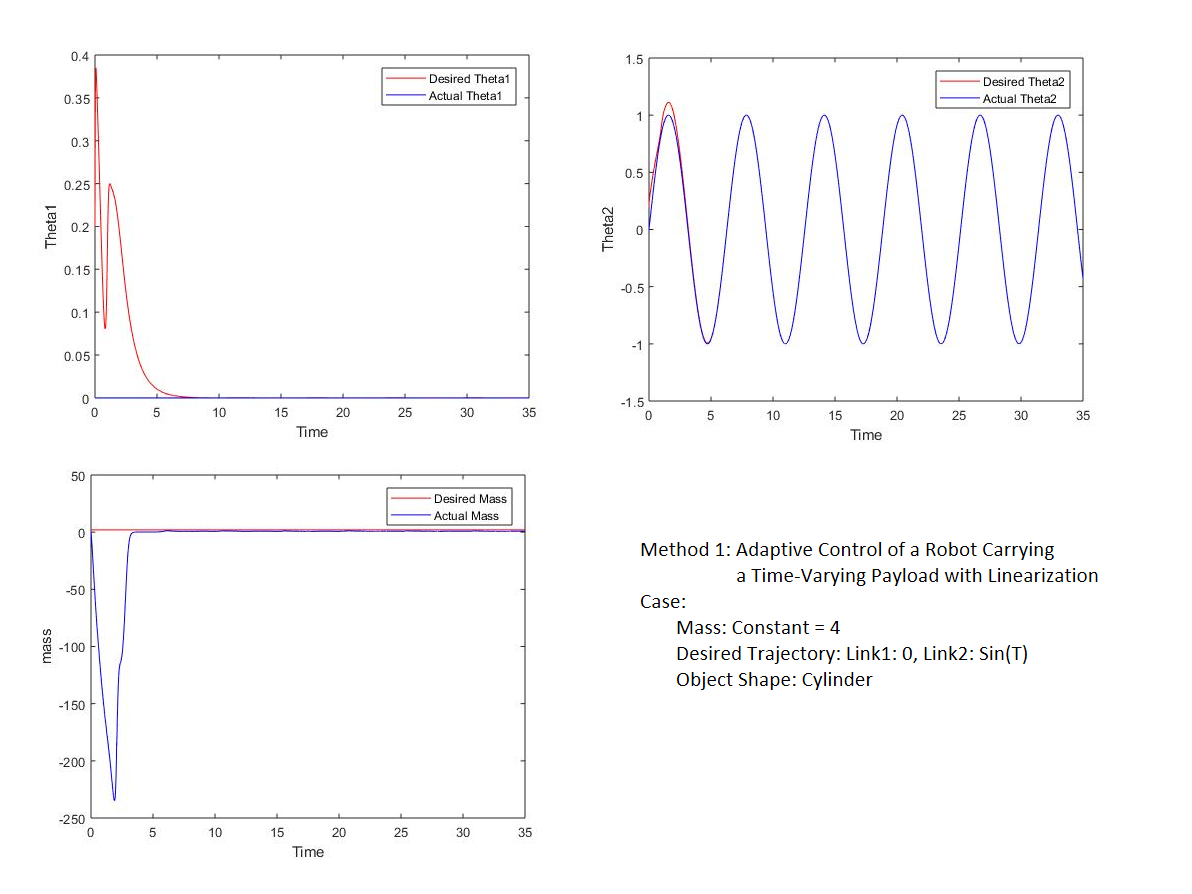
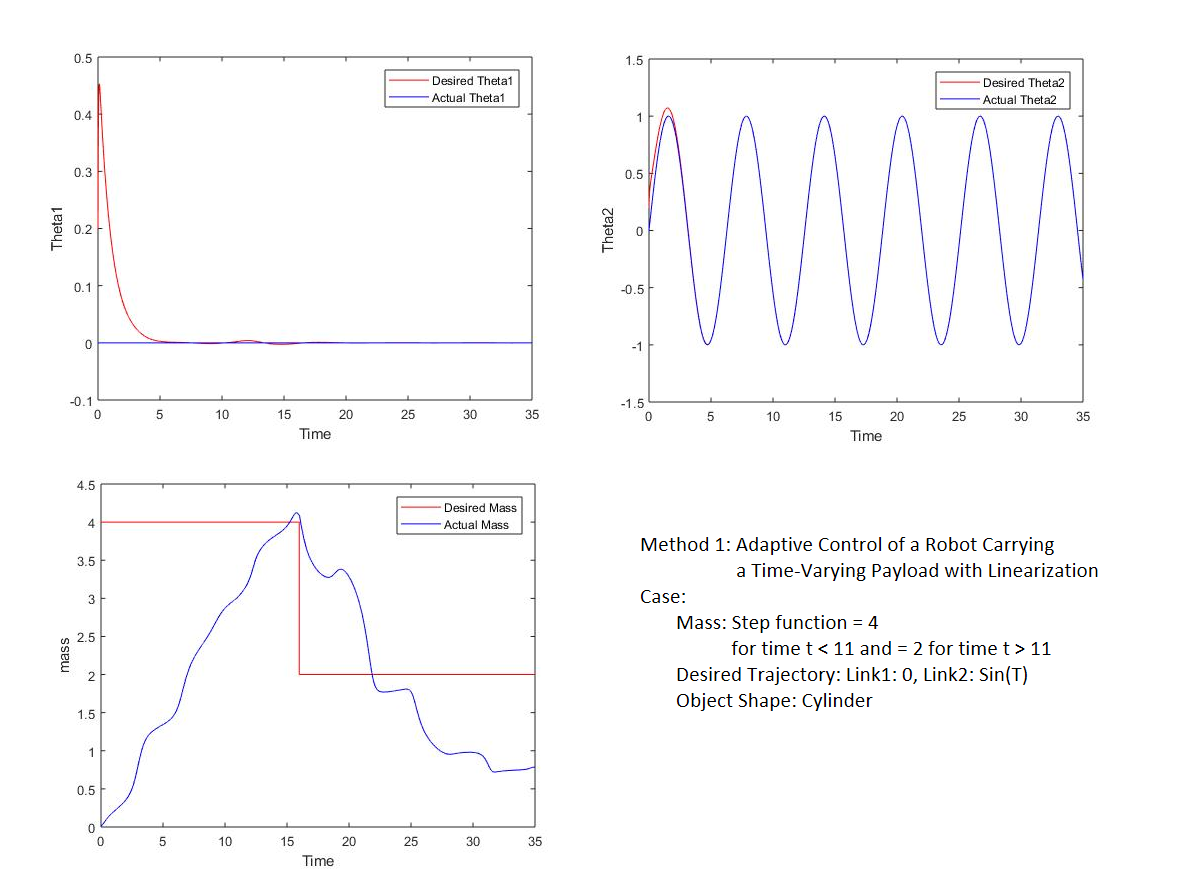
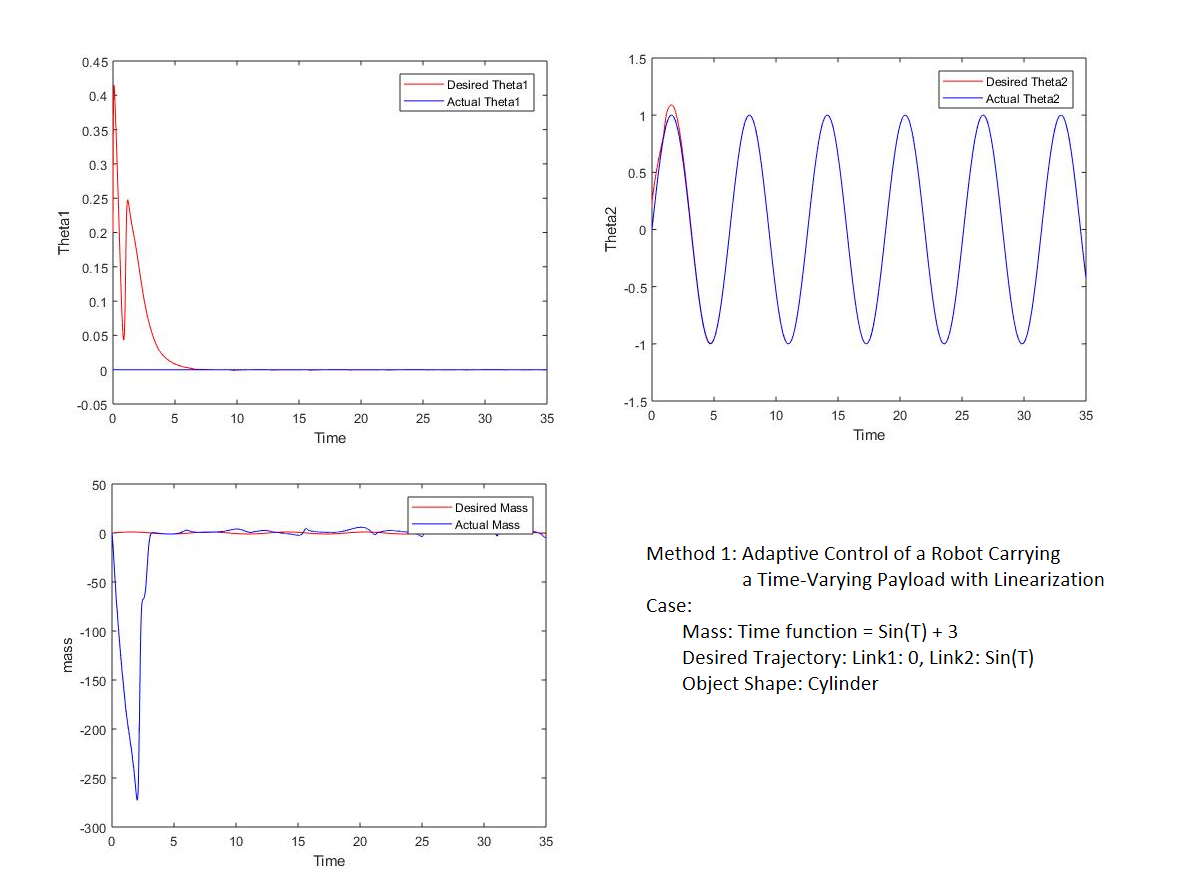
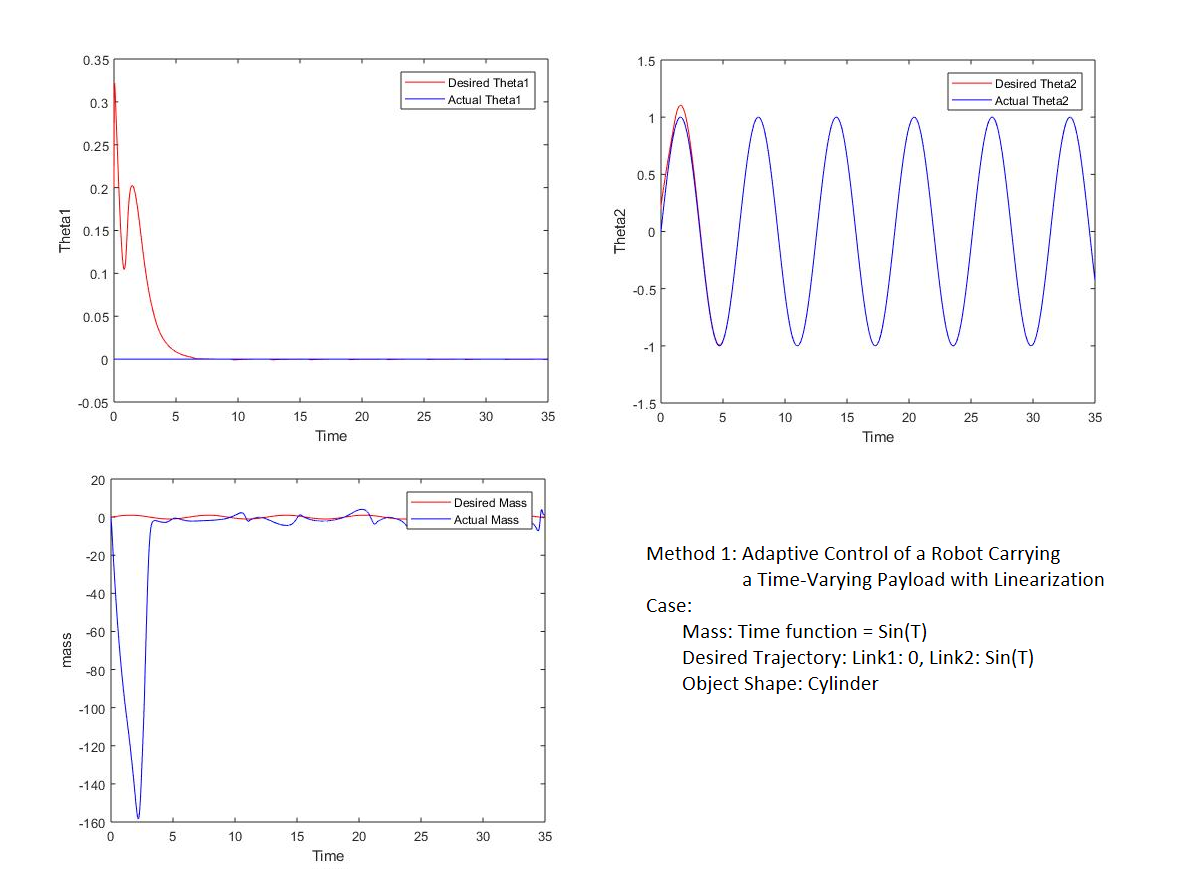
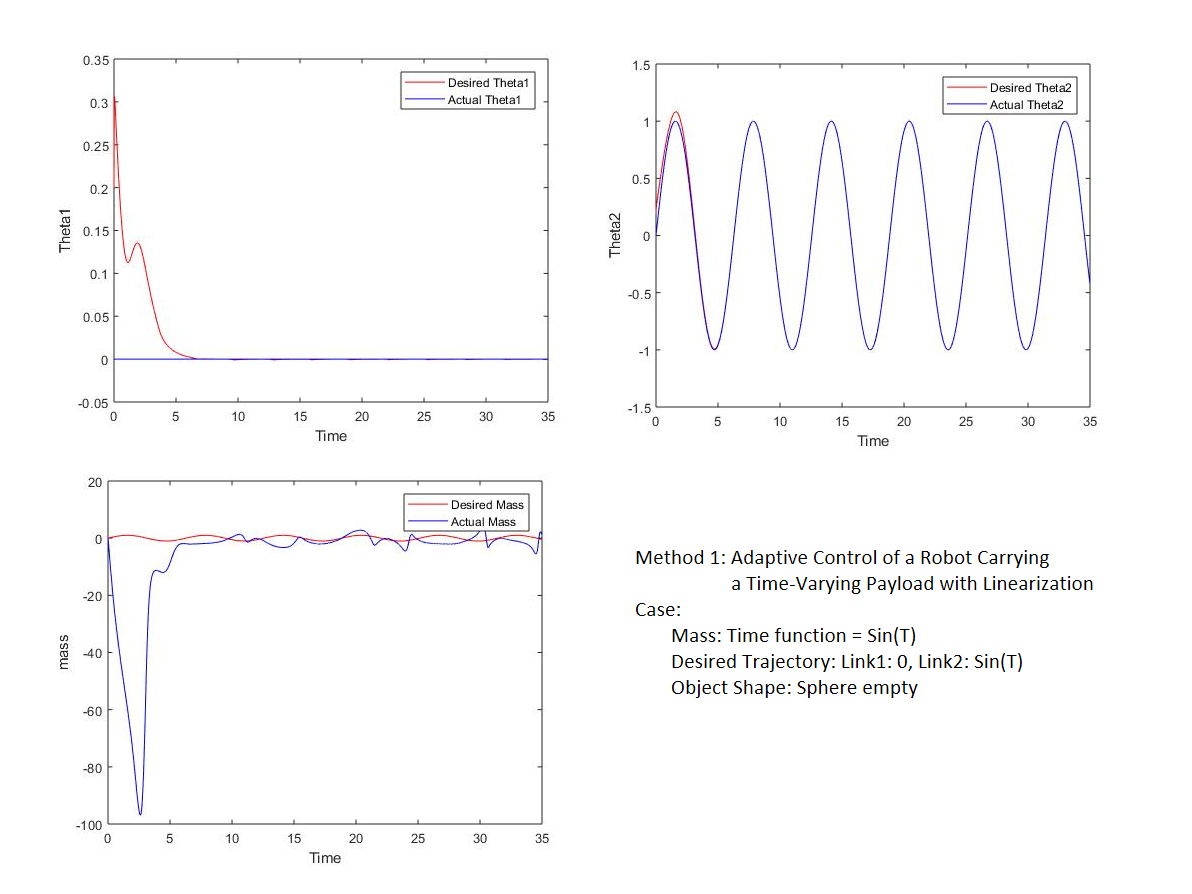
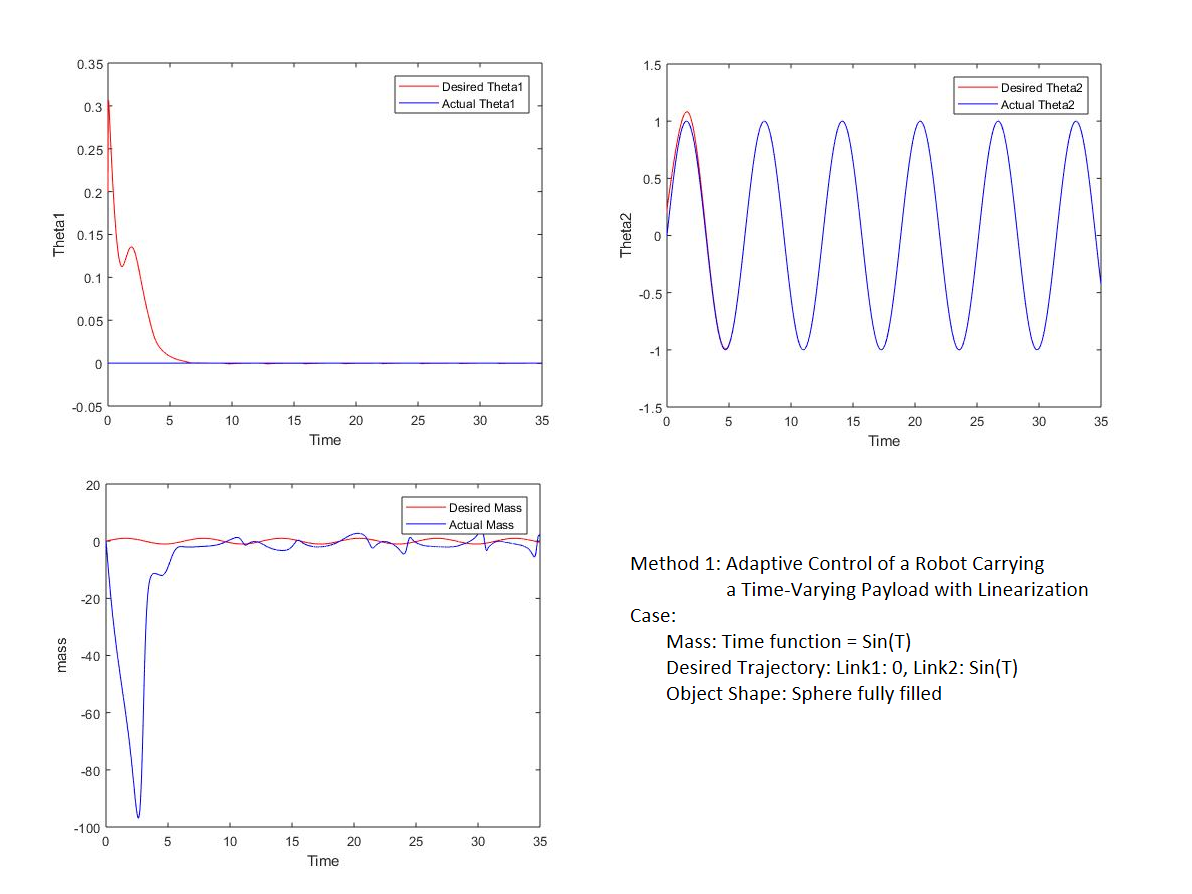
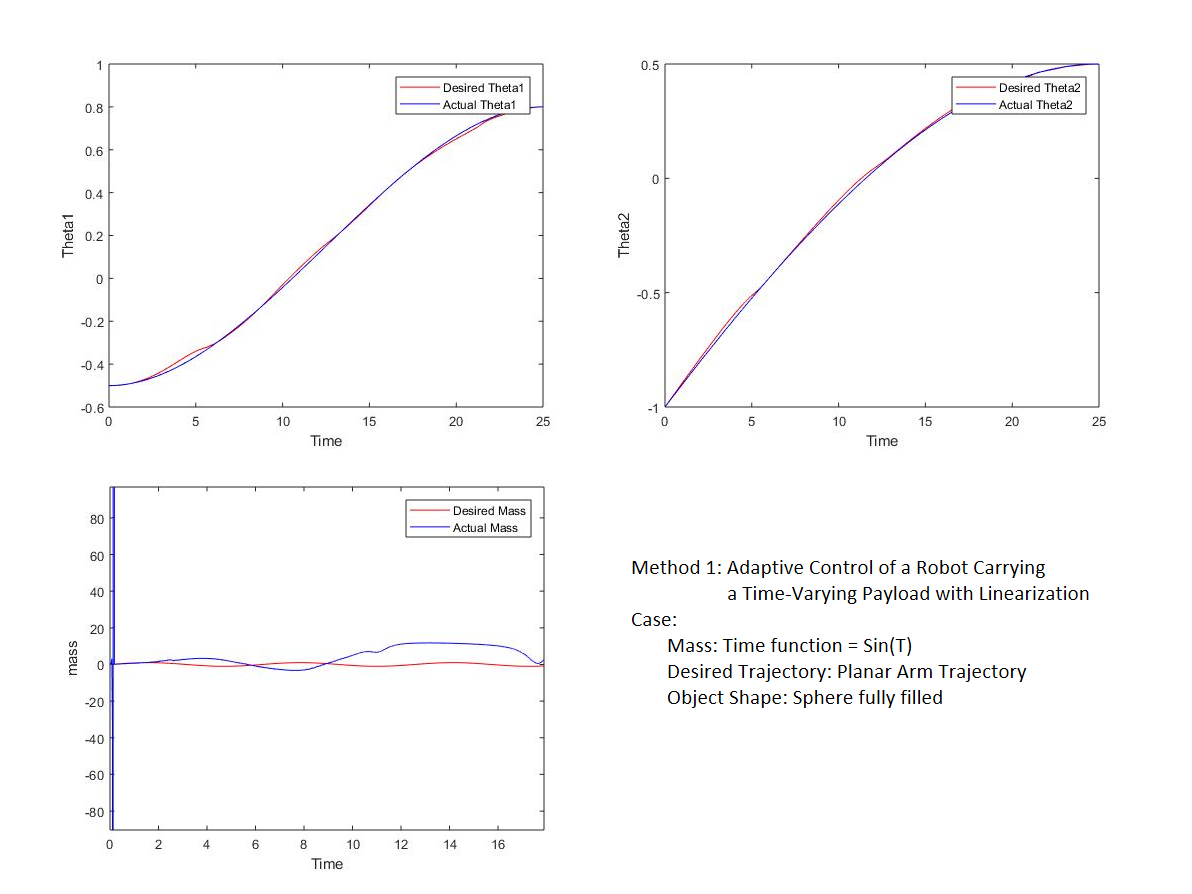
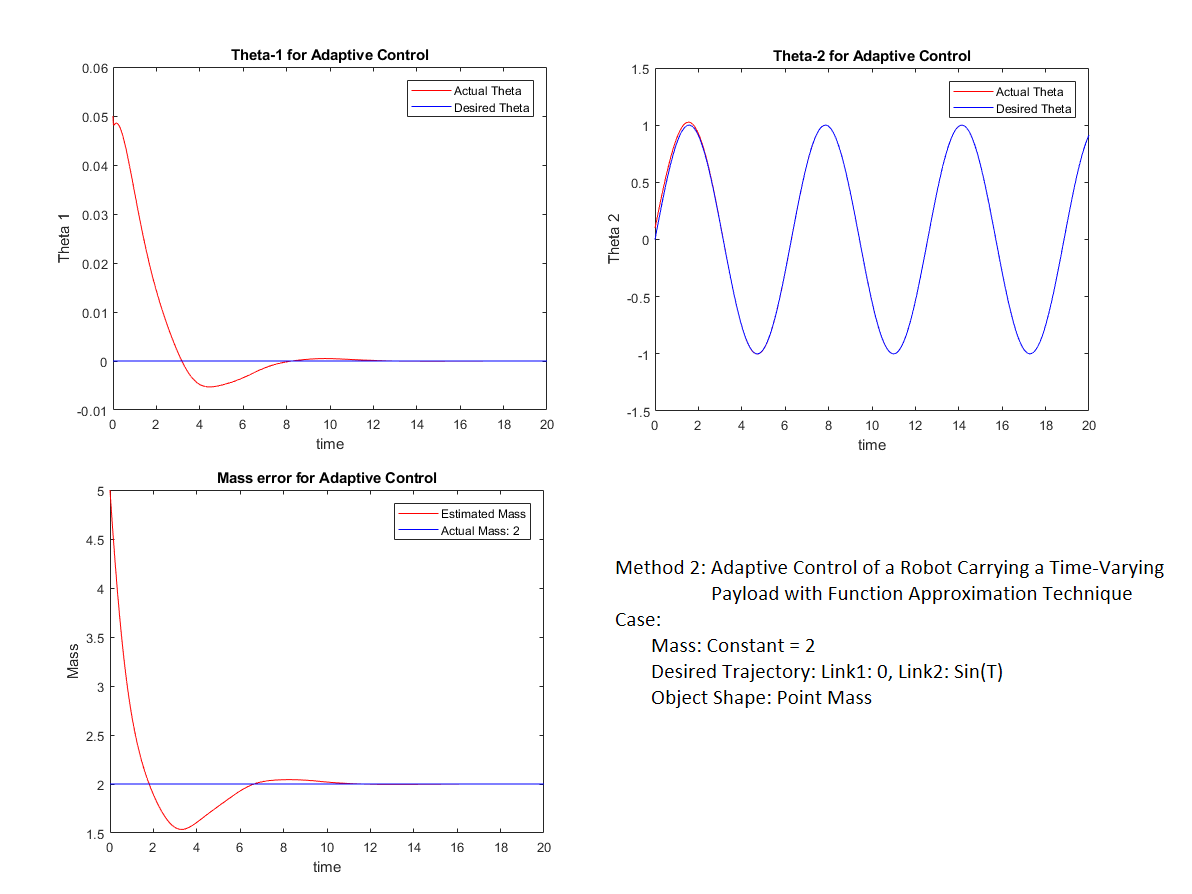
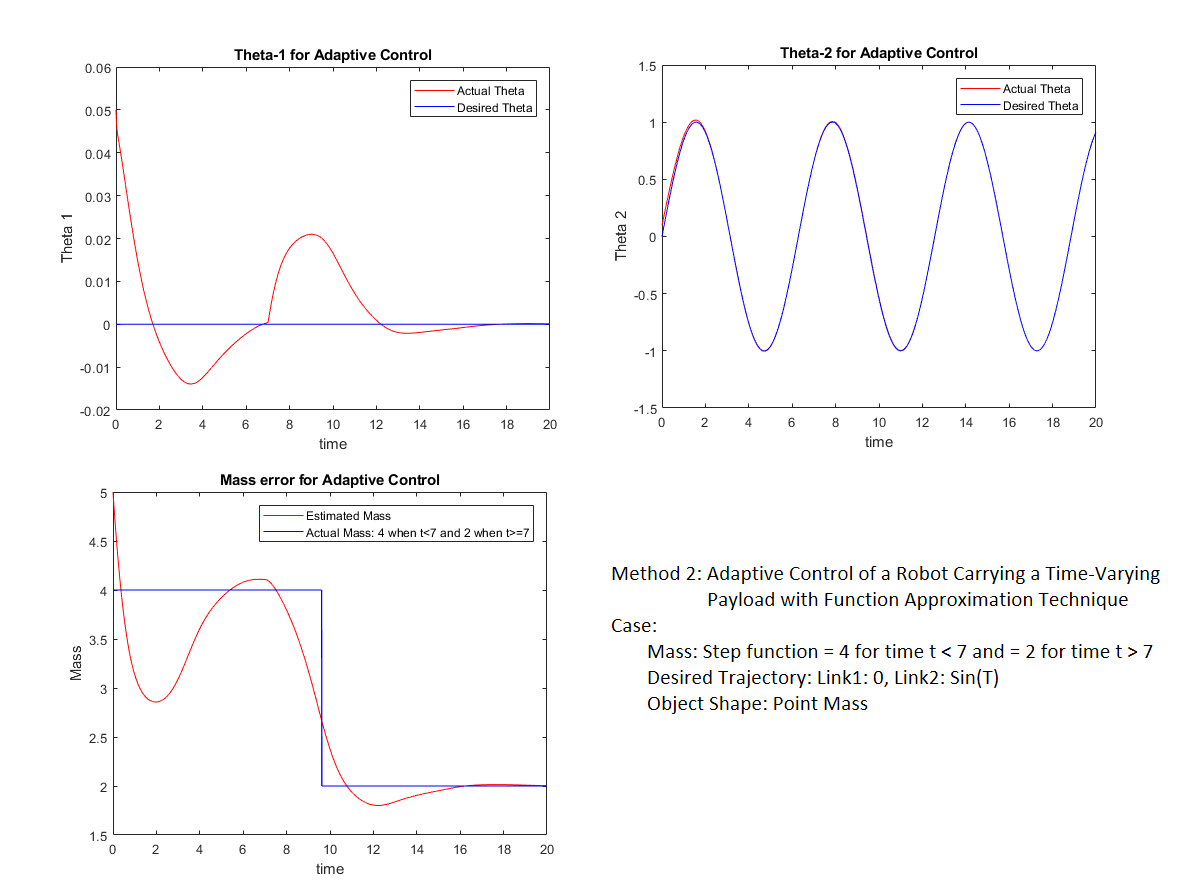
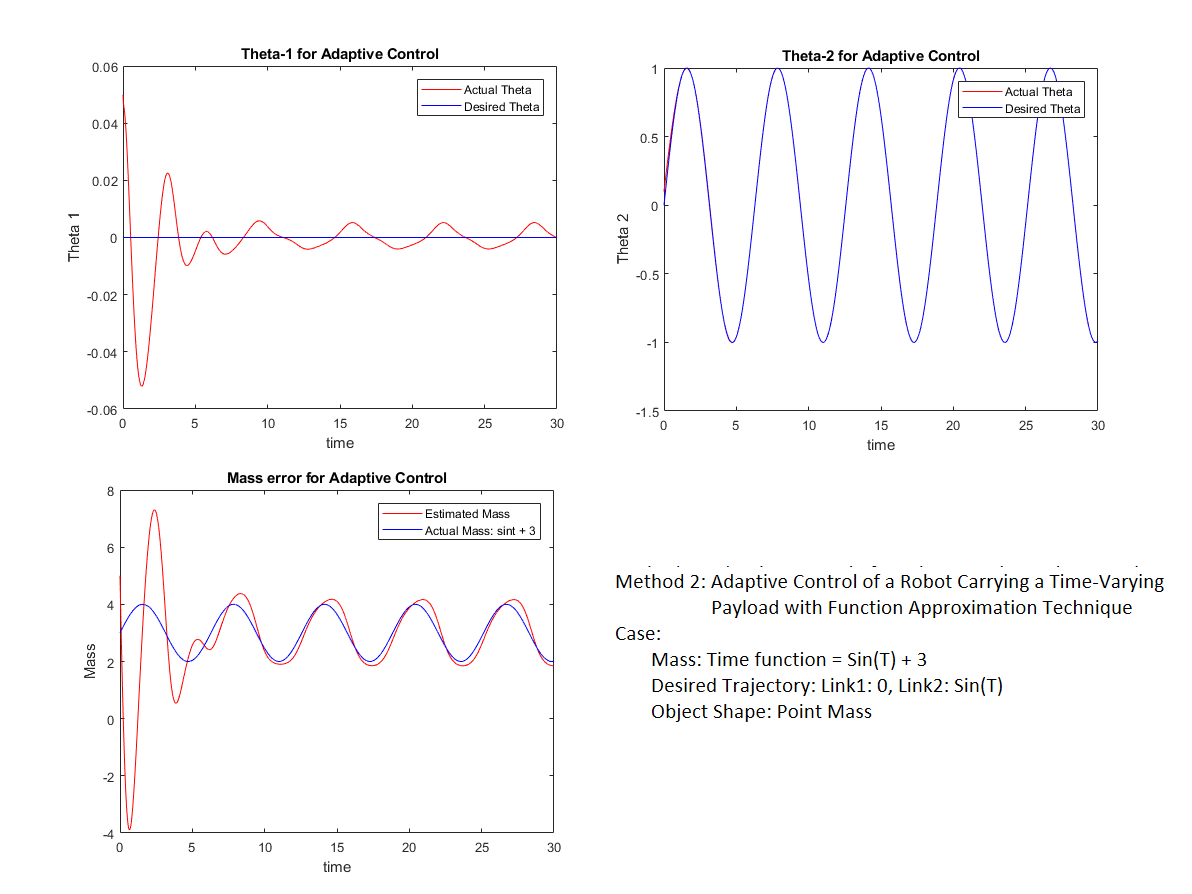
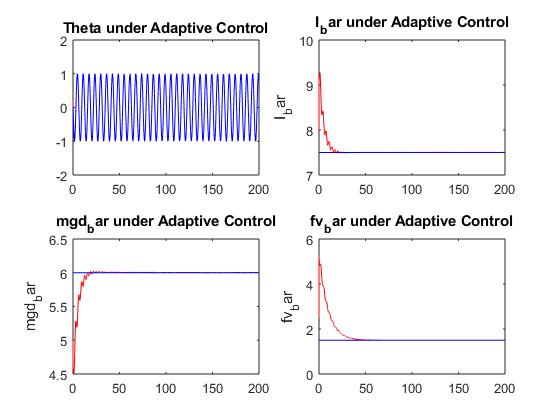
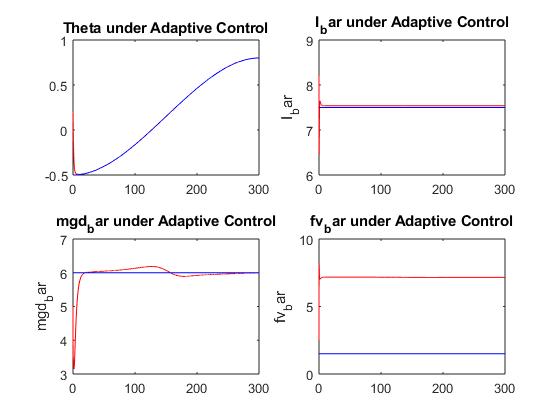
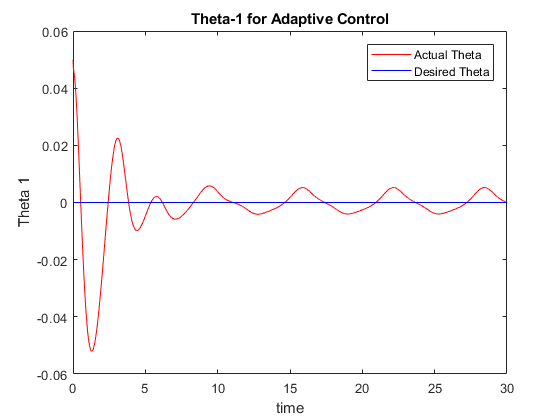
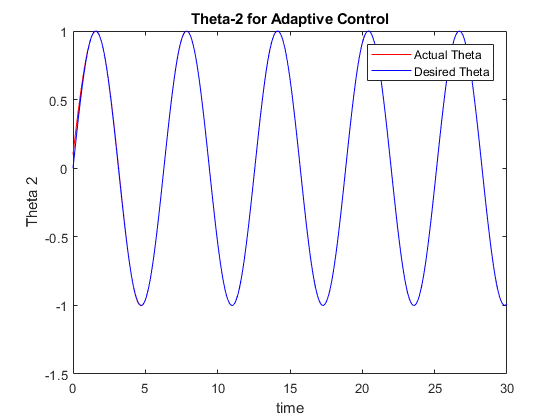
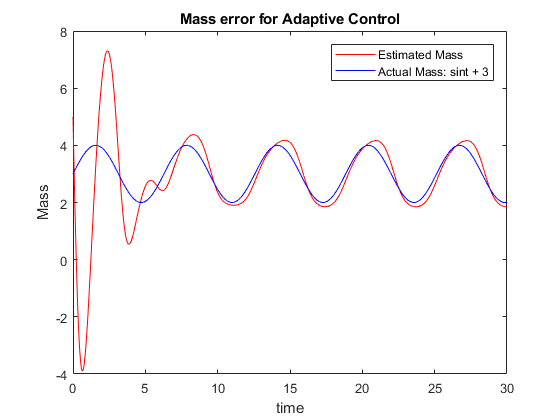
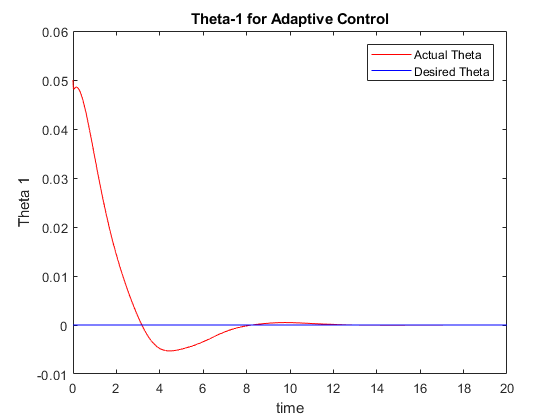
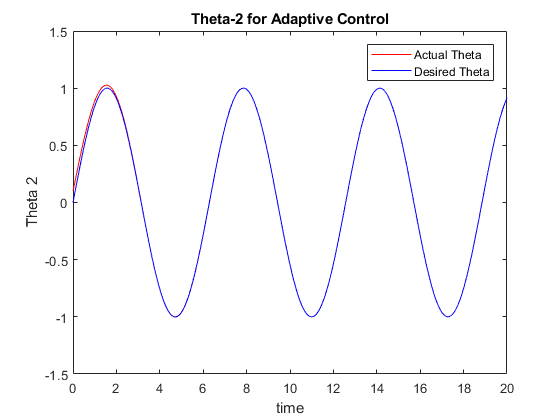
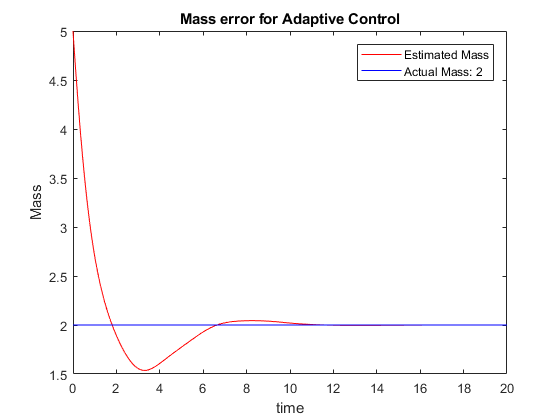
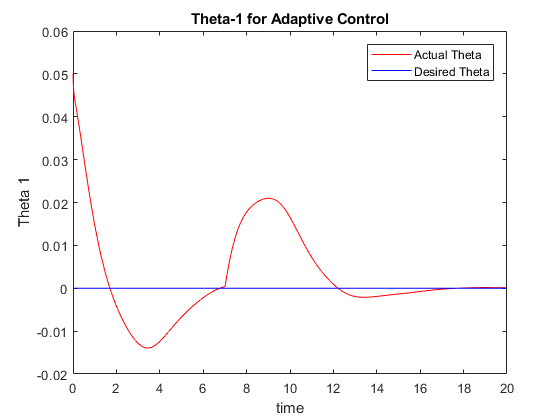
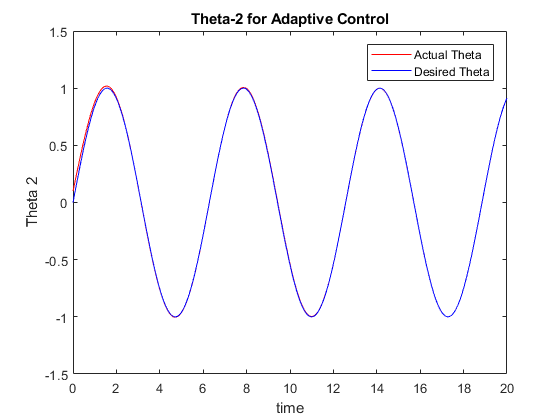
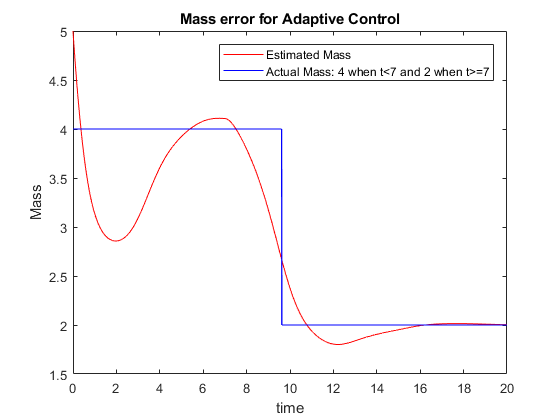
The focus of this project is to implement two methods for an adaptive trajectory tracking control on a robotic arm manipulator such that the robot arm can maintain its desired trajectory while carrying objects of different masses. While the first technique relies on linear parameterization, the second method works on function approximation techniques. In both methods, the control law has to be updated in a way that it adjusts the gain such that the output does not change with changing parameters of the dynamic model (mass of the object,in this instance). Subsequently, the robot arm can be made to follow a given trajectory while also accommodating for the change in mass of the object it is carrying.
Read MoreGitHub Link