Abstract
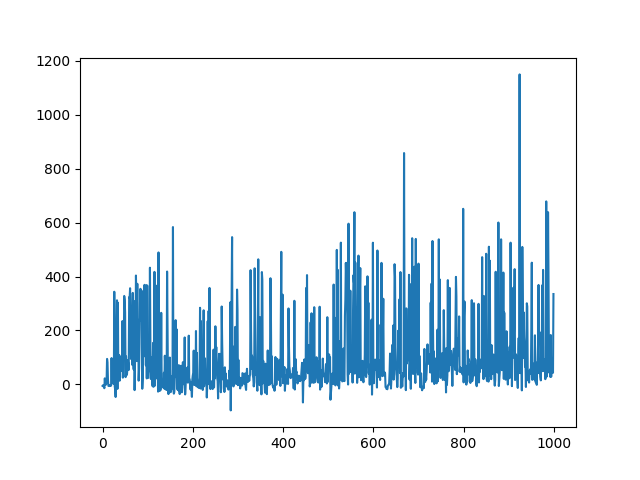
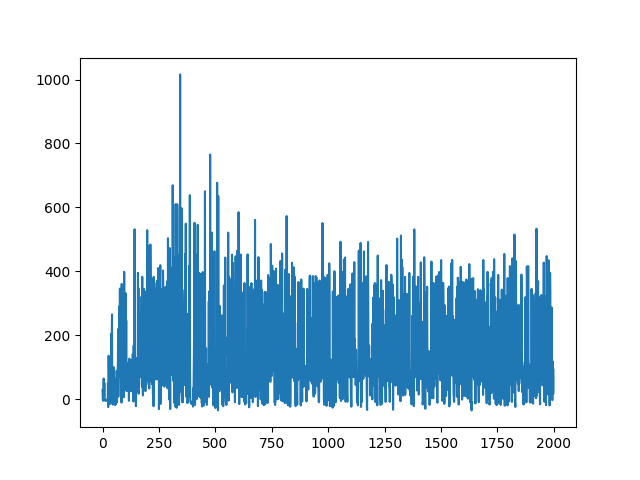
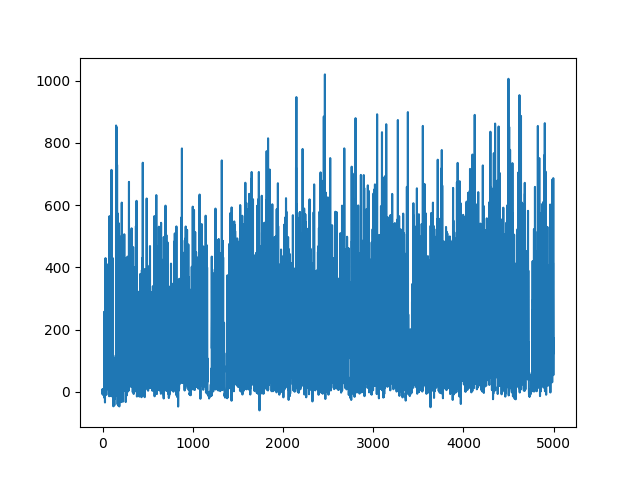
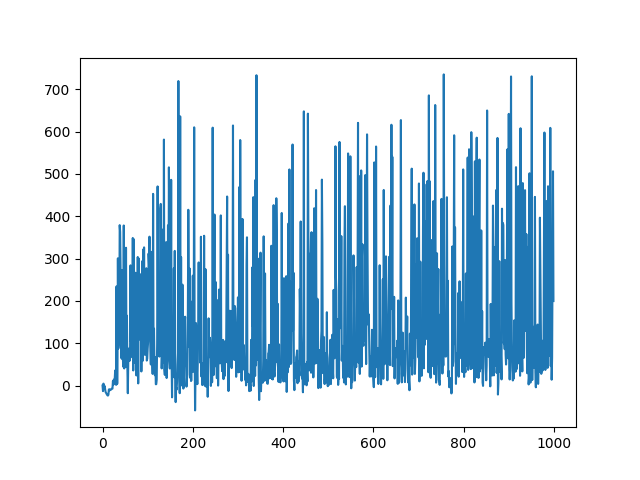
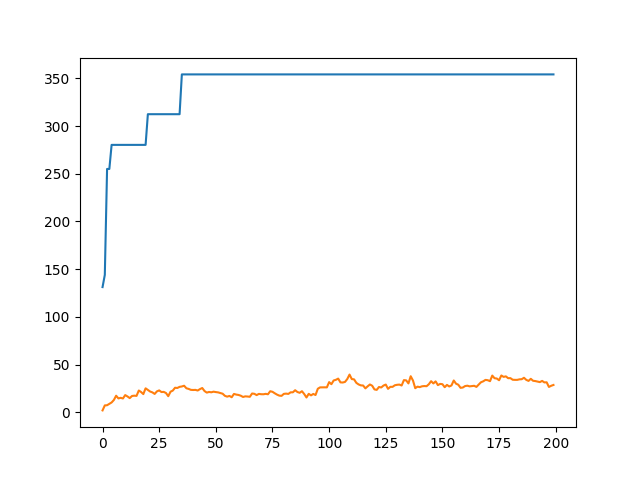
The aim of the project is to train a Bipedal Walker using OpenAI Gym Environment and MuJoCo physics engine, so that the walker can run as fast as possible without falling over.
Read More The aim of the project is to train a Bipedal Walker using OpenAI Gym Environment and MuJoCo physics engine, so that the walker can run as fast as possible without falling over.
Read More